 da
da de
de es
es fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fiHow Automotive Ethernet Contributes to the Development of Domain Controllers
There was a time when every control unit in the car operated completely stand-alone and therefore had its own sensors and actuators. These sensors and actuators were therefore directly connected to the control unit. Simple and effective. However, as the number of sensors, actuators and control units continued to increase, the cable harnesses also grew. Soon literally miles of cable were needed and the overview was hard to find. An improvement had to be made.
That is why the CAN network was introduced in the early 90s. Control units were able to exchange information with each other, including signals from sensors. A true revolution in the automotive world. Since then, the network architecture within a vehicle has continued to develop. With the arrival of electric powertrains and autonomous technology, even greater strides are guaranteed to be made in the near future.

But this also means that a lot will change in the way electronics are implemented in a vehicle. Long story short: within 10 years a domain controller or supercomputer will be in charge of all functions within the entire powertrain. The ECU as we know it now will then have a more subordinate role. As these domain controllers and the associated networks continue to develop, the individual control units will slowly disappear (yes, the ECU too), until eventually only a handful of domain controllers or supercomputers rule the roost.
But before that, we want to explain a little more about the network that will play an important role in this. Despite the fact that Automotive Ethernet has been available for quite some time, its ingenuity is increasing.
The Beginning: A central gateway
The automotive industry is constantly looking for more and more data speed and more and more possibilities for mutual communication. Already in 2004, during the development of the FlexRay network, the car manufacturers realized that they had to take a new path in terms of communication between the various control units. The size of software updates was getting out of hand and with the speed of the HS CAN being used at the time, an update would take literally dozens of hours. An unworkable situation of course.
The solution came in 2008 in the form of a central gateway, which not only had the task of exchanging data between the various existing CAN, FlexRay and MOST (Media Oriented Systems Transport) networks, but also served as an interface to the outside world for diagnosis and programming (software updates, etc.). BMW was the first with such a new central gateway.
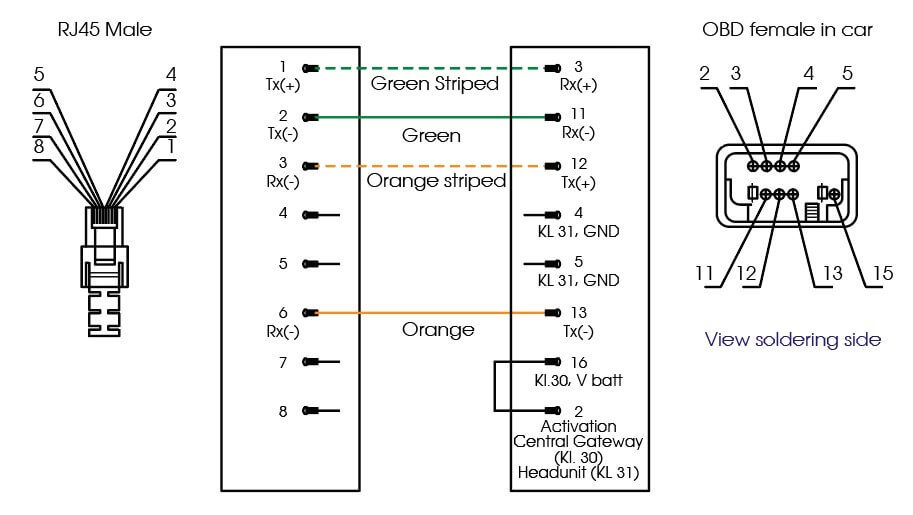
Image: Pin 3, 11, 12 and 13 in the OBDII port are used to communicate with the outside world via an Ethernet connection
So the OBDII port no longer had two CAN lines for the dealer equipment to communicate with the car, but four Ethernet lines, which exactly correspond to the RJ-45 connector that we know so well from the Ethernet in computer networks . Pins 3, 11, 12 and 13 in the OBDII port are thus used to communicate with the outside world via an Ethernet connection.
Automotive Ethernet Standard: 100BASE-T1
The technique of Ethernet has of course been around for a while. But there was no application for the automotive industry due to the very strict requirements for chips and other electronic components. Until 2004, Ethernet had never been used in vehicles and so a whole new range of chips, semiconductors and switches had to be developed, especially for these purposes. The cabling was also a challenge, because for several reasons there was a desire to achieve 100 Mbps on an Unshielded Twisted Single Pair cable (a cable just like CAN and FlexRay). Ultimately, this resulted in a new Ethernet standard especially for the automotive industry: 100BASE-T1. It was introduced in 2013 and had a data rate of 50 Mbps. In 2020, the 1000BASE-T1 was introduced, which can deliver a data rate of 1000 Mbps (1 Gbps). The industry is already working hard to achieve speeds of 50 Gbps.
Possibilities for the future
Since Ethernet has become an integral part of everyday life, the possibilities are now endless. The computer technology of the current PCs, laptops and tablets can also be implemented in vehicles with the arrival of Automotive Ethernet. This also means that graphical computing power for autonomous driving is no longer a problem.
To get a clear picture of the transformation in the network architecture, it is necessary to realize how communication is arranged in current (3rd generation) vehicles. In the image below, the central gateway is shown as the largest purple block. The smaller green blocks are control units that each have their own communication network: LIN, CAN or FlexRay.
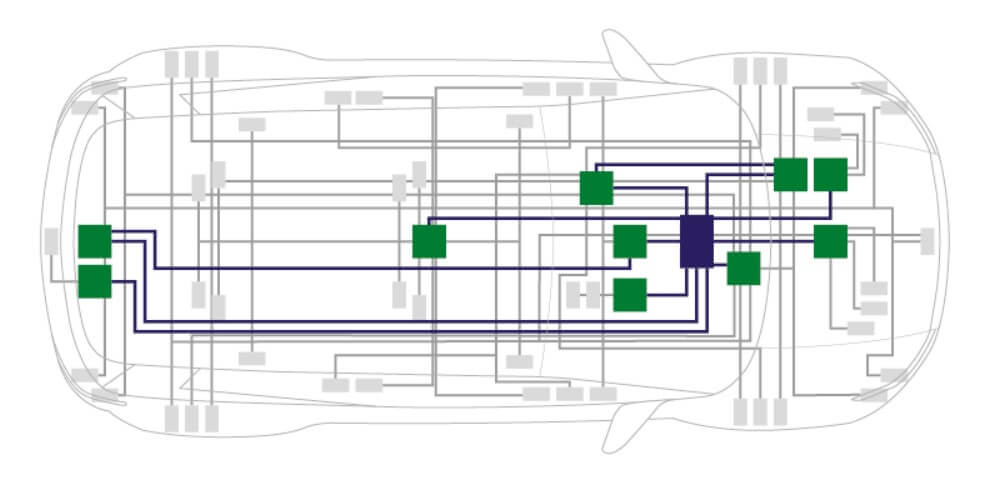
Image: Communication network architecture in current (3rd generation) vehicles
However, the number of control units is getting out of hand and the current control units will no longer be able to cope with their tasks in the near future. Domain controllers will therefore be located under the central gateway, all of which also communicate over the Ethernet (also shown in purple). One of those domain controllers will focus purely on all data and functions related to autonomous driving. In this 4th generation network, control units and subnetworks will certainly still exist, but the network will have the speed where it is needed.
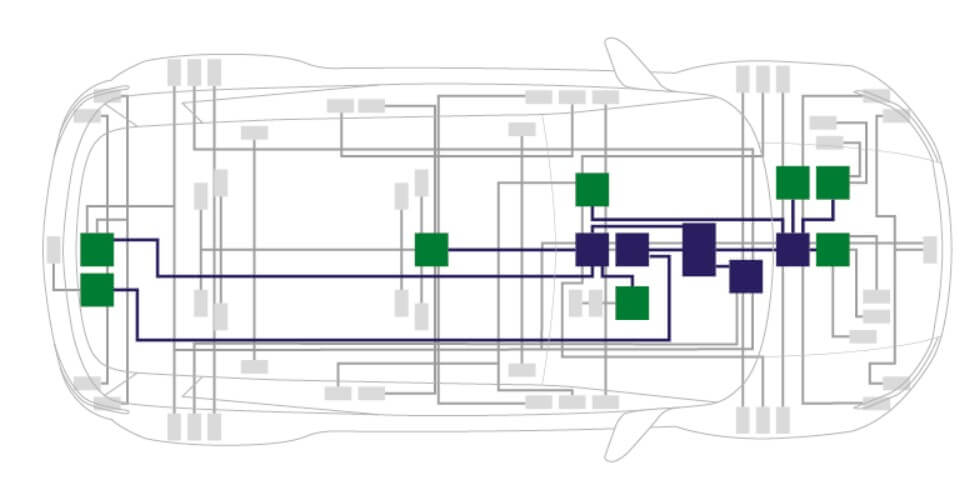
Image: Communication network architecture in (4th generation) near future vehicles
It is difficult to predict exactly what a 5th generation network will look like in practice, but after the implementation of domain controllers a clear trend is expected: the structure will become considerably less complex through the massive reduction of components. The arrival of smart sensors and actuators will make the use of control units completely unnecessary. What remains is a lightweight but powerful network of a few domain controllers or supercomputers that will manage all systems within the vehicle by working closely together.