 da
da de
de es
es fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fiSensors For Object Detection: What Variants Are There and How Do They Work?
More than ever before, the engine management system is influenced by external signals. In the future, autonomous driving will determine much more when and how the engine management should respond. Functions such as automatic emergency braking and adaptive cruise control already ensure that the ECU no longer responds solely to the accelerator pedal. Even though all those sensors for object detection are not directly part of the engine management system, it is important for a good picture of the future how these sensors influence the operation of the engine management.
Ultrasonic Sensors & Sound Waves
We start with the ultrasonic sensors. These sensors detect objects using sound waves. It does not matter whether the object is transparent or opaque, ferrous or non-ferrous, solid, liquid or powder. The sensor emits ultrasonic sound waves through an emitter, which then collide with possible obstacles. The returning signal is then picked up by the detector and a simple calculation follows to determine the distance to the obstacle:
D = 0,5T x C
'D' is the distance, 'T' is the time between sending and detecting the ultrasonic sound waves and 'C' is the constant for the speed at which the sound waves travel: 343 meters per second. Remember this calculation carefully, because although the 'C' differs per type of sensor, every sensor that measures distance basically uses the same simple calculation.
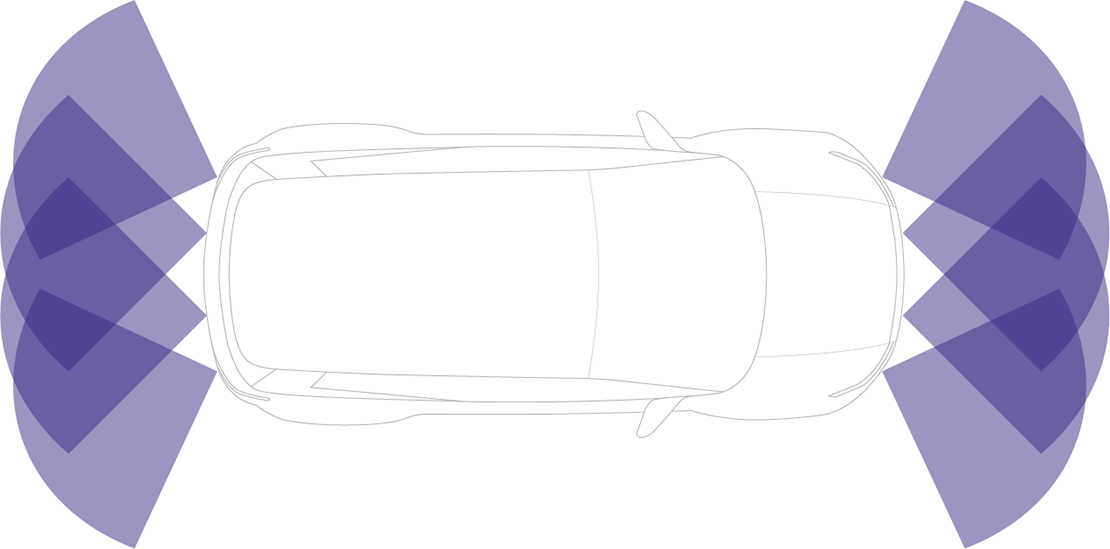
Image: Schematic representation of the operation of ultrasonic sensors
Ultrasonic sensors are often used as parking sensors in the bumper. This makes them automatically part of pre-collision braking and automatic parking systems. Signals from ultrasonic sensors are therefore rarely used 'pure', but first processed in a data acquisition unit. If you want to check whether an ultrasonic sensor is functioning properly, not only measure the power supply (usually 5V) and ground, but also check the incoming and outgoing signal with a scope.
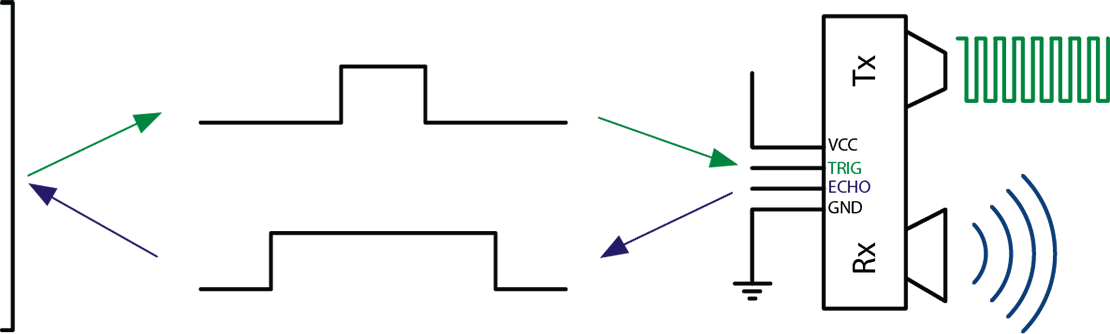
Image: Square wave that should be visible through the scope
Radar sensors & radio waves
Radar uses radio waves to detect the distance, angle and speed of passing objects. A good example is the Beamsteering Radar SPEKTRA from Metawave, which was presented at the beginning of 2020. Metawave has developed a new type of radar with a frequency of 77 GHz(!). The radar scans the environment very quickly in steps of just 0.1 degrees with a narrow angle of 22 degrees (Field of View). This creates an extreme amount of overlap, which allows the radar to very accurately detect the speed and direction of movement of objects, including crossing traffic. Until now, predicting speed and direction of movement has been a major problem with autonomous vehicles.
This new type of radar opens up a world for car manufacturers, because systems such as ADAS, blind spot monitoring, automatic emergency braking, adaptive cruise control, traffic jam autopilot, highway autopilot, lane assist, etc. can be implemented relatively easily using this radar. Previously, this was much more complex to achieve.
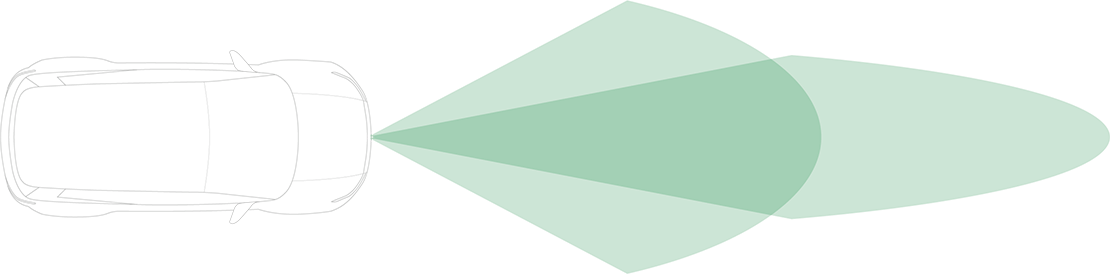
Image: Schematic representation of the operation of radar sensors
LiDAR & light pulses
Instead of radio waves, LiDAR (LIght Detection And Ranging or Laser Imaging Detection And Ranging) emits infrared light pulses to detect objects. Due to the speed and small diameter of the light pulse, LiDAR is also able to see very small objects. So you can actually see LiDAR as the fast full-HD version of radar. This also enables detailed 3D rendering of the environment, a feature that is particularly useful in realizing autonomous driving. The technology is still somewhat expensive and the LiDAR sensors for this application are still a bit on the large side, but experts within the automotive industry believe that LiDAR will become essential in the future in the further development of autonomous vehicles.
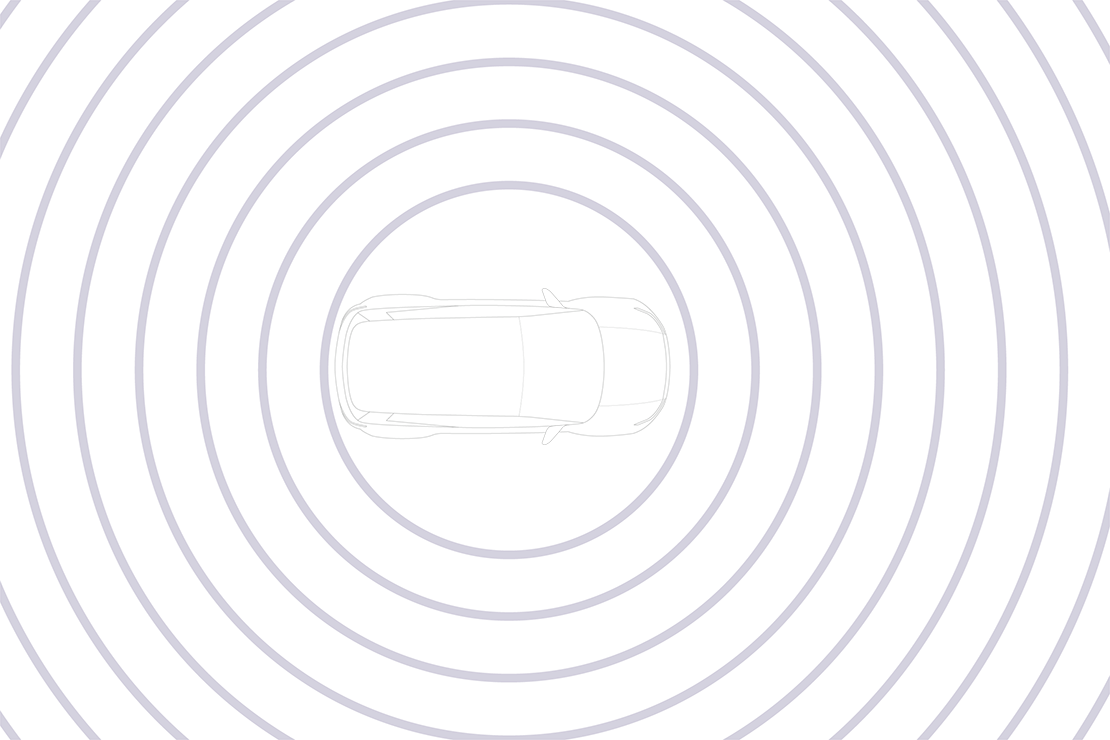
Image: Schematic representation of how LiDAR sensors work
Fun Fact: Did you know that LiDAR sensors are now even used in mobile phones? Both the newer generations of the Apple iPhone have such a sensor. The sensor can be recognized by the flat black circle next to the camera lenses. These mobile phones can now see depth, this offers enormous possibilities for augmented reality applications. In addition, the camera system is able to focus on a specific object much faster and more accurately.
Solid State LiDAR
In an attempt to make LiDAR cheaper (and therefore more suitable for mass production), the automotive industry also seems to be increasingly focusing on 'iPhone-like' LiDAR sensors. Unfortunately, these solid state sensors are not able to create a complete virtual environment image while running, but by working together, 9 of these sensors can together image the entire environment. In addition to the lower costs, this has another advantage: large, ugly protrusions are a thing of the past, which helps both the aerodynamics and the design of autonomous vehicles. For example, Volkswagen, GM and a number of Chinese car brands have already invested heavily in this technology.
FIR & Infrared Light Waves
Even though a lot of time is currently being spent on the development of radar and LiDAR for autonomous driving, both technologies also have their disadvantages. That is why they are now also looking at another technology (widely used by the military): Far Infrared Technology (FIR). An FIR camera 'sees' infrared light waves and can convert them into an image. The camera is able to do this because every object or material radiates its own temperature.
However, unlike radar and LiDAR, FIR does not generate a direct 3D environment. That is why we expect a combination of several techniques in the future. However, this will cause a huge data flow. In addition, there are also several manufacturers that focus on a camera system to make autonomous driving possible.